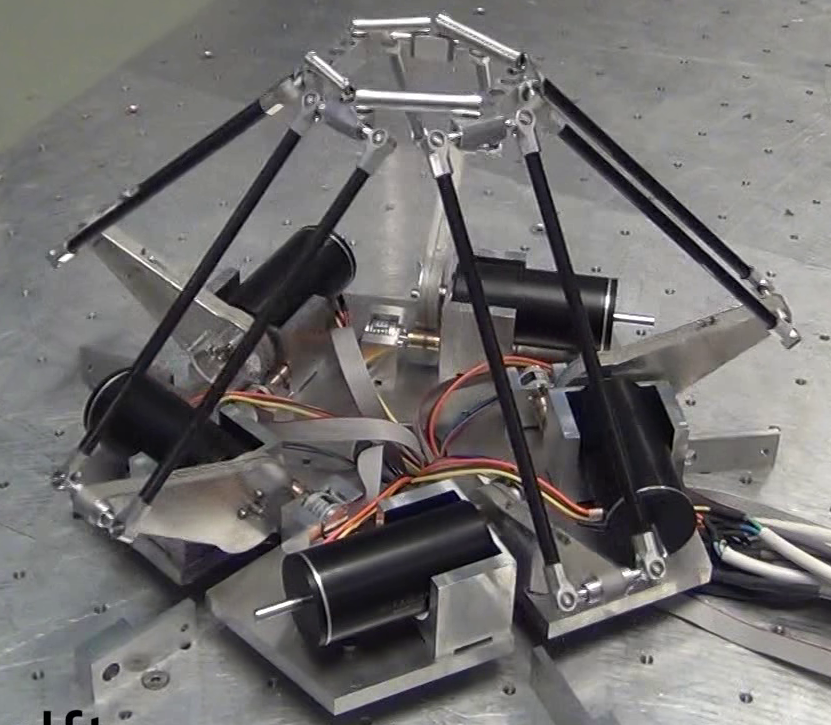
Second prototype of the PentaG haptic robot operational
The second prototype of the PentaG haptic robot has been implementated and experimentally validated. The 5 DOF robot generates 3T1R motion (3 translations + 1 rotation) plus a linear grasping motion. Thanks to a novel configurable platform, the grasping DOF is fully coupled with the remaining DOF of the robot while all 5 motors are located on the base. The resulting high structural stiffness provides good mechanical transparency while the grasping capabilities allows the operator to use his index and thumb to grasp and interact with the objects in a more natural way than with a single point contact. Direct drive transmission is used for in order to limit the perceived inertia of the motor shafts.
A video of the robot, used in closed-loop position control, can be found here.