“TU Delft Hapkit” – 1 DOF telemanipulator
Developed by: Ids Dijkstra, Mick van de Kant, Jeroen Wildenbeest, Teun Hoevenaars (based on Hapkit)Operational since: 2014
Abstract
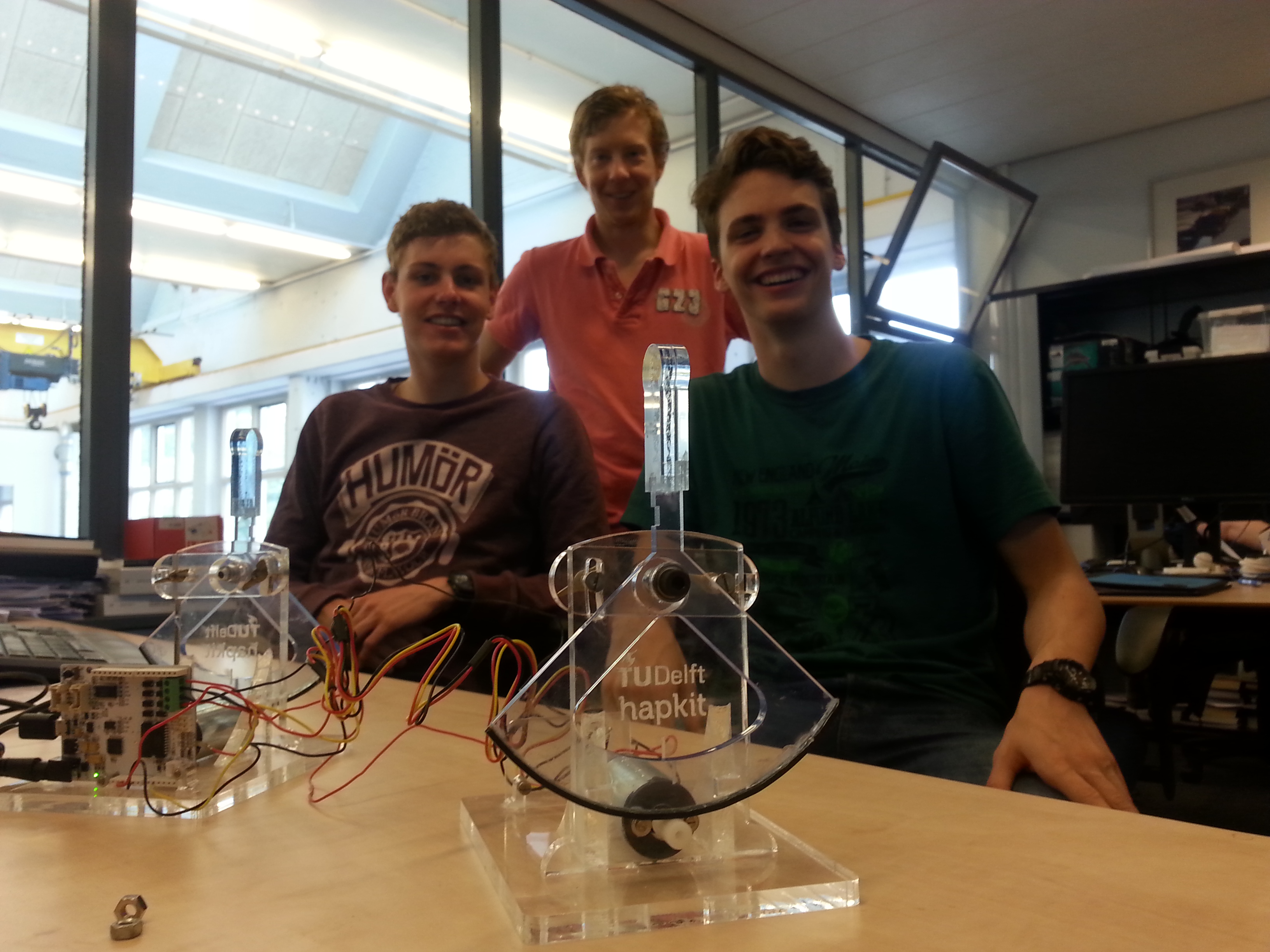
Like the Gemini, this setup consists of a set of two identical 1 DOF robotic manipulators, that can be linked through a controller to act as a master-slave telemanipulator; or alternatively they can function as two separate master devices for bi-manual control in a virtual environment.
The design of each of the two manipulators was based on the Hapkit, an open-hardware haptic device designed to be very low-cost and easy to assemble. The Hapkit was developed at the Charmlab at Stanford University, after the Haptic Paddle originally designed in Prof. Mark Cutkosky’s laboratory in the mid-1990s.
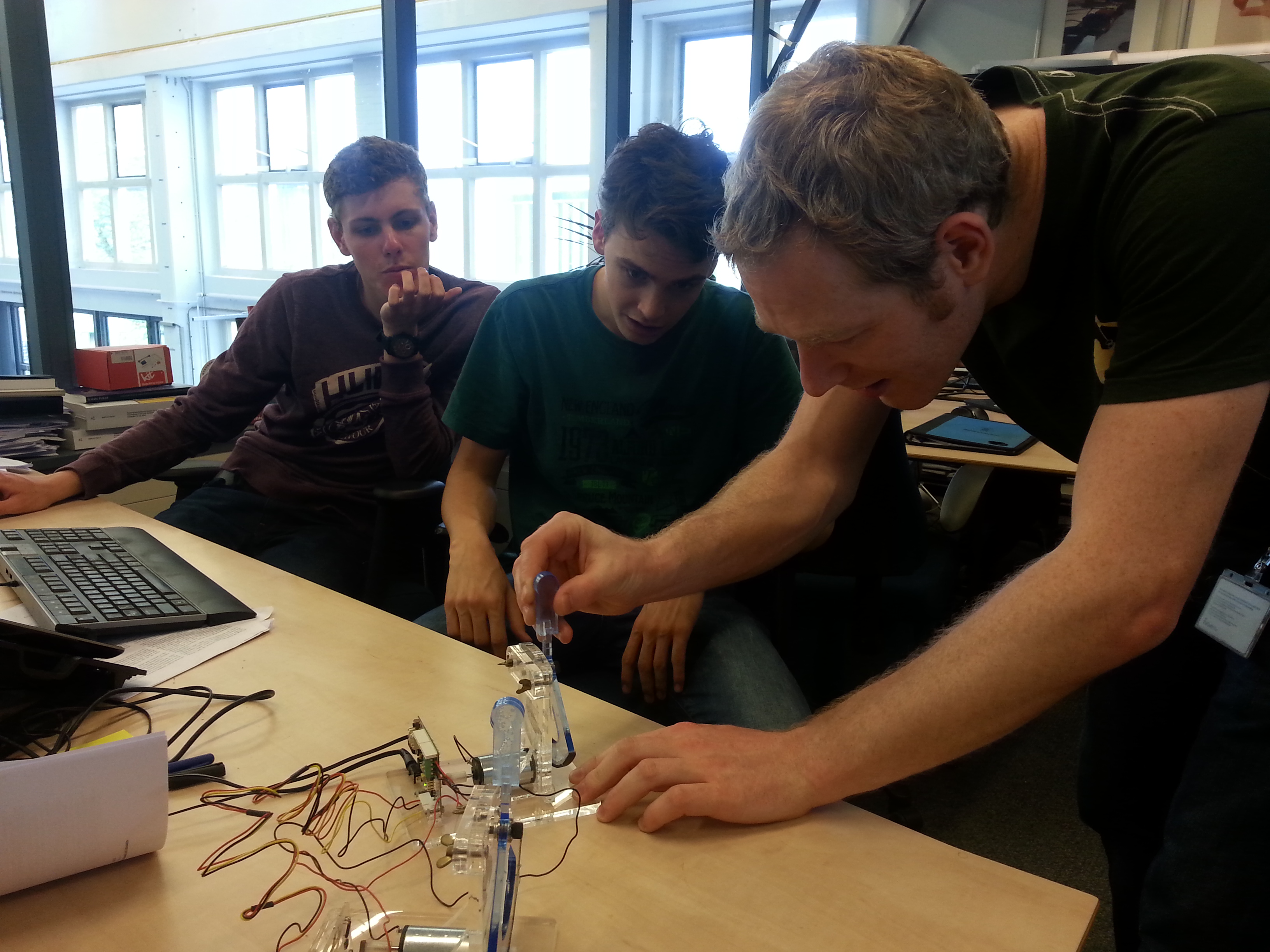
The TU Delft version of the Hapkit was developed by two high school students, Ids Dijkstra and Mick van de Kant, under supervision of Teun Hoevenaars and Jeroen Wildenbeest. Their challenge was first to adapt the Hapkit to European standards and parts availability to assemble two identical examples of the device, and second to connect them using a controller; thereby realizing a 1 DOF telemanipulator.
The device has been operational since summer 2014, and has been used for demos on location, classes, and for David’s media appearances for de Universiteit van Nederland.